___ _____ ______ ________
|\ \ |\ _ \ _ \|\ _____\
\ \ \ \ \ \\\__\ \ \ \ \__/
\ \ \ \ \ \\|__| \ \ \ __\
\ \ \____\ \ \ \ \ \ \ \_|
\ \_______\ \__\ \ \__\ \__\
\|_______|\|__| \|__|\|__|
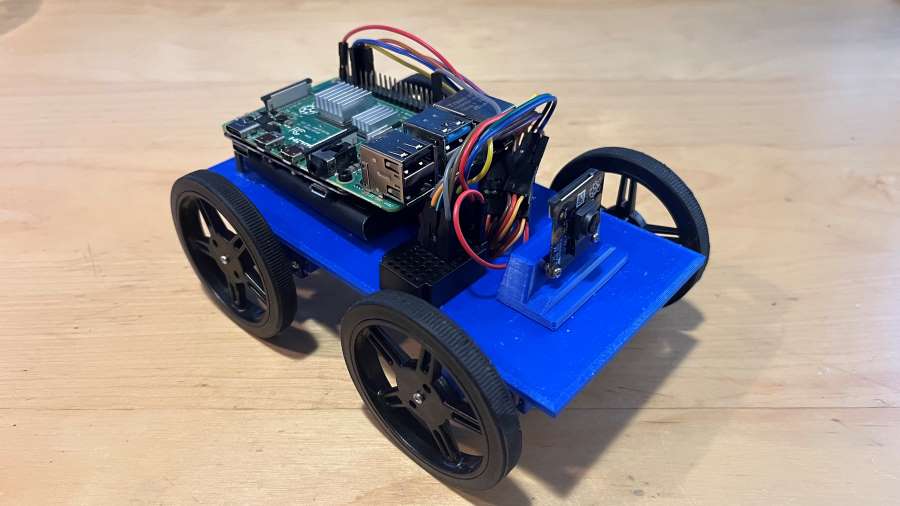
This is a complete remake of my "Remote Controlled Raspbery Pi Car" I made about a year ago in September.
A list of changes made to the PiRover v2:
The chasis is smaller, more compact, and prints in just 4 hours, 6 hours less than version 1.
I created a web app hosted on the Raspberry Pi using the Flask library allowing easy and intuitive control of the "PiRover".
In the past, there had been a "stutter" on the motors when idle, now thats completely gone.
Powering the Raspberry Pi 4B is a PiSugar S Plus to give uninterrupted power for the project.
And here's a video of it running
The code was compeltely rewritten to be more streamlined and efficient. This time using the same Pigpio library for controlling the motors in addition to the Flask library for web interface. Making web apps in Flask using python is quite simple.
The raspberry pi was configured to create its own private network that could be connected to for easy access to the web interface using NetworkManager, heres a guide to do that.
Here are the Parts I Used:
All of the files and libraries used in this project are on my github