
___ _____ ______ ________
|\ \ |\ _ \ _ \|\ _____\
\ \ \ \ \ \\\__\ \ \ \ \__/
\ \ \ \ \ \\|__| \ \ \ __\
\ \ \____\ \ \ \ \ \ \ \_|
\ \_______\ \__\ \ \__\ \__\
\|_______|\|__| \|__|\|__|
This project was for a competition hosted by a club at my University called HackHardware. It's a club that hosts engineering competitions during the fall and spring semesters. This fall semester they hosted "Hack and Smash", a battlebots inspired sumo wrestling robot competition. The goal was to create a robot with the provided materials that could push other robots out of a 5-6' ring.
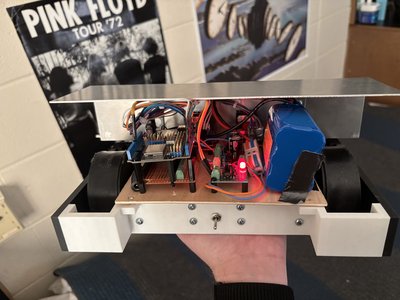
Below is what my friends and I made!
Click here to see a video of one of our matches!
We designed the battlebot with the only goal of pushing others. We settled on a metal exterior wedge shaped robot and got to work designing 3D prints to hold it all together.
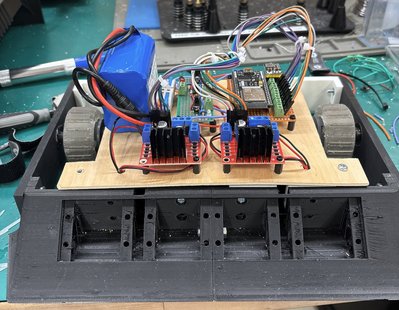
We were restricted to an Esp32 microcontroller as well as 4 DC motors with plastic gearboxes as well as L298N motor drivers.
The whole system ran on a 12V battery pack, and I desgined and soldered a power distribution perf board as well as a perfboard for the microcontroller to sit on with a buck converter to step down the 12V to a stable 3.3V.
For communication, we used a bluetooth controller and the Esp32 Bluepad library with basic modified L298N example code.
We had a lot of hiccups, but in the end we got 2nd place in the tournament, and it was a great experience!
One such "hiccup" included me frying the drivetrain 1 hour before our first match, such a great time. But we made it out pretty well and all things considered im very satisfied with this project.
If we had more time, we would have tested weight distribution more and gotten a more ideal balance for pushing others.